Communications Service¶
The communications service provides a bridge for communicating with the satellite in both development and flight environments. The service itself is built to work across multiple different transports and is easily expandable to work over additional transports in the future. Currently the communications service is implemented in Lua, but in the future it will likely be implemented in Rust.
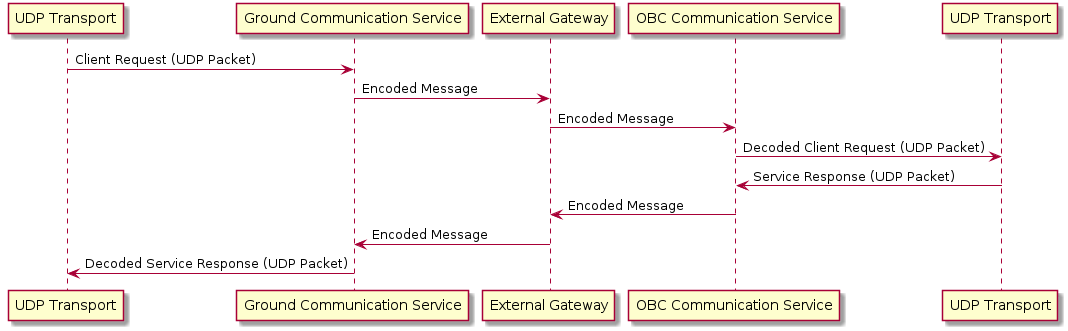
The communication service functions essentially as a UDP tunnel between various physical transports. It is intended to always be used with one UDP transport and one non-UDP transport. Currently there are two serial-based transports available, with radio-based transports in the works.
A typical production setup would involve one communication service instance running on the flight OBC and one instance running on the ground segment. Each instance would use a UDP transport in order to communicate with local services or clients. The OBC’s instance would use a transport custom to the radio gateway. The ground’s instance would also use a custom transport designed for the ground side of the gateway.
Running¶
This service is currently implemented in Lua. General instructions for running Lua projects within the Kubos SDK can be found here.
The communication service has a single required argument - the configuration file. It is specified like so:
$ cd services/communication-service
$ luvi-regular . -- config.toml
Configuring¶
The communications service is configured using a toml file which specifies
the transports used on either end of the service.
An example configuration which allows local UDP services to communicate over a dev serial port:
[[communication-service]]
name = "Local Services"
transport = "udp"
[[communication-service]]
name = "Dev Serial"
transport = "serial"
device = "/dev/ttyS3"
baud = 115200
Another example configuration which allows local UDP clients to communicate with remote services over serial:
[[communication-service]]
name = "Local Clients"
transport = "udp"
expose-ports = [ 6000, 7000 ]
[[communication-service]]
name = "Dev Serial"
transport = "serial"
device = "/dev/ttyUSB4"
baud = 115200
Transports¶
Transports are different sources of messages for the communication service. They will often take the form of physical layers such as serial links or radios. The communication service should always be configured with one UDP transport to allow communication with local services. A single communication service instance can only be configured to work with exactly two transports at a time.
UDP¶
The majority of the time the communication service will be using a UDP transport on one end.
This transport allows the communication service to send or receive raw UDP packets
on the local network.
Configure the service to use this transport by specifying udp.
There is a single optional configuration option for this transport: expose-ports.
The expose-ports option takes a list of ports to listen on for traffic.
This option is used when clients need to send data over the UDP transport;
it is not necessary when services are listening for data.
Example using expose-ports
[[communication-service]]
name = "Dev Clients"
transport = "udp"
expose-ports = [ 8001, 8002 ]
Serial¶
The serial transport allows routing of communication data over a local serial device.
This transport is useful when doing local development on an OBC with primarily serial interfaces.
Configure the service to use this transport by specifying serial.
There are two required configuration options for this transport:
device- The path to the serial portbaud- The speed of serial communications
Example
[[communication-service]]
name = "Dev Serial"
transport = "serial"
path = "/dev/ttyUSB1"
baud = 9600
Debug Serial¶
The debug-serial transport allows routing of communication data over the debug console.
This transport is meant to be used on an embedded target with a debug console and
is primarily meant to be used when no other serial ports are available.
Note
When using this transport the service must be run while on the debug console. The service will take full control of the debug console once started. The only way to step it is by terminating the service, usually by rebooting the device.
Configure the service to use this transport by specifying debug-serial.
There is a single required configuration option for this transport:
baud- The speed of serial communications
Example
[[communication-service]]
name = "Dev Serial"
transport = "debug-serial"
baud = 9600